自动化学院在国际顶级期刊《Robotics and Computer-Integrated Manufacturing》和《Automation in Construction》上发表重要研究成果
近日,自动化学院具身智能与装备控制实验室团队在机器人方向最新系列研究成果“Trajectory error compensation method for grinding robots based on kinematic calibration and joint variable prediction”和“Adaptive climbing and automatic inspection robot for variable curvature walls of industrial storage tank facilities”,分别被国际顶级期刊《Robotics and Computer-Integrated Manufacturing》(IF=11.4)和《Automation in Construction》(IF=11.5)正式发表。
成果一:Trajectory error compensation method for grinding robots based on kinematic calibration and joint variable prediction
轨迹精度是评估磨削机器人动态性能的关键指标,本研究利用机器人微分运动学理论给出了误差补偿策略,提出了一种利用环形粒子群优化(RPSO)的机器人运动学标定方法来解决磨削机器人中的静态误差,并设计了一种基于双通道前馈神经网络(DCFNN)的机器人关节变量预测方法,以减轻动态误差。大量数据分析表明,该方法可使机器人的绝对位置精度提高了89.3%,误差波动范围减小了74.2%。算法比较表明,运动学标定能够显著降低轨迹的平均误差,而关节变量预测则可以显著减小误差的波动范围。通过轨迹直线度测试和3D打印螺旋桨磨削实验进行验证,结果显示,该方法可将轨迹的直线度控制在0.2425 mm以内。可将螺旋桨表面加工余量公差范围部分控制在86.1%以内。。
[1] Kaiwei Ma(马凯威), Fengyu Xu(徐丰羽), Qingyu Xu , Shuang Gao, Guoping Jiang(蒋国平). Trajectory error compensation method for grinding robots based on kinematic calibration and joint variable prediction,Robotics and Computer - Integrated Manufacturing, 2025, Vol 92, 102889. DOI10.1016/j.rcim.2024.102889.
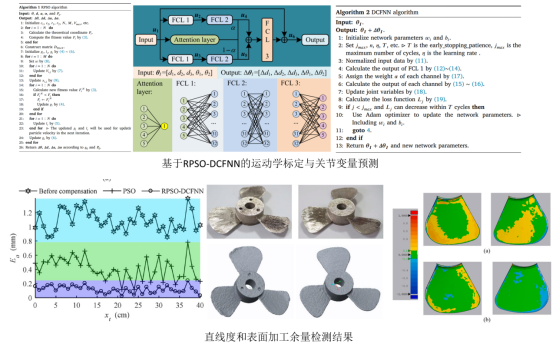
图1:基于RPSO-DCFNN的运动学标定和关节变量预测及效果图
成果二:Adaptive climbing and automatic inspection robot for variable curvature walls of industrial storage tank facilities
定期检查对于大型石化储罐设施的安全运行至关重要,但在高空施工环境中传统的人工操作效率低下且危险性高。为了实现对大型石化罐壁的自动检测和维护,该团队提出了一种用于变曲率罐壁的自适应爬升装备模型,设计了一种具有磁吸附轮、曲率自适应机构和倾斜调节结构的检测机器人,该检测机器人具有多功能检查和维护能力。团队对机器人在曲面上的爬行动力学和姿态适应性进行了分析、评估和实验,结果表明,该机器人能够自适应地在弯曲的罐壁上操作,并执行多功能任务,包括飞行时间衍射(TOFD)超声波探伤、抛光、涂漆和清洁,所研发的机器人可以显著提高弯曲储罐等设施的自动检测效率。

图2:爬壁机器人样机及运行效果
[2] Li Jie(李杰), Zhou, Xiang (周翔), Gui Chao, Yang MingXing, Xu FengYu (徐丰羽), Wang, XingSong. Adaptive climbing and automatic inspection robot for variable curvature walls of industrial storage tank facilities. Automation in Construction,Volume172,106049. DOI 10.1016/j.autcon.2025.106049.
Rob. Comput. Integr. Manuf.期刊是由爱思唯尔(Elsevier)出版的双月刊,是计算机科学、工程制造和机器人领域公认的国际顶级期刊,最新影响因子IF=11.4,年发文量稳定在150篇左右,体现了编辑团队对期刊质量的严格控制。
Autom. Constr.期刊是由爱思唯尔(Elsevier)出版的双月刊,是工程与建筑自动化领域公认的国际顶级期刊,最新影响因子IF=11.5,其发表的学术成果在行业内具有广泛认可度。
(撰稿:马凯威 编辑:张敏 初审:徐丰羽 审核:张翼)